Shape from silhouette in space time and light domains
This project introduces a framework for extracting object silhouettes in a non-interactive manner and integrating them into a visual hull. The foundational concept relies on the idea that the background can be arbitrary but must remain consistent for a specific light source. The key concept involves estimating the temporal evolution of pixel intensity, leading to a robust background likelihood estimation. This likelihood is then integrated into a Markov Random Field (MRF) framework for silhouette extraction. Subsequently, the extracted silhouettes undergo iterative updates in 3D space to ensure the consistency of object boundaries.
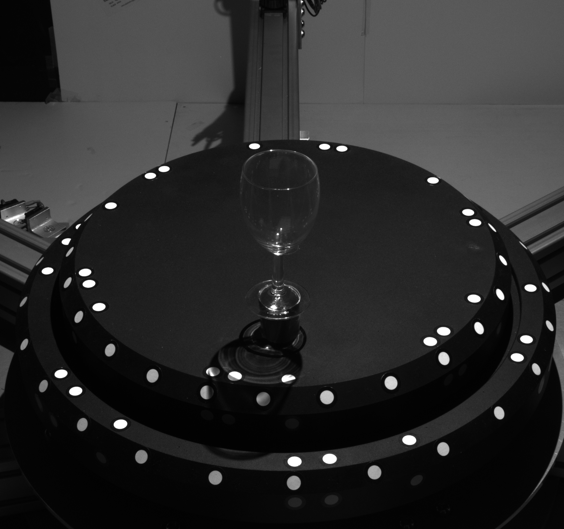
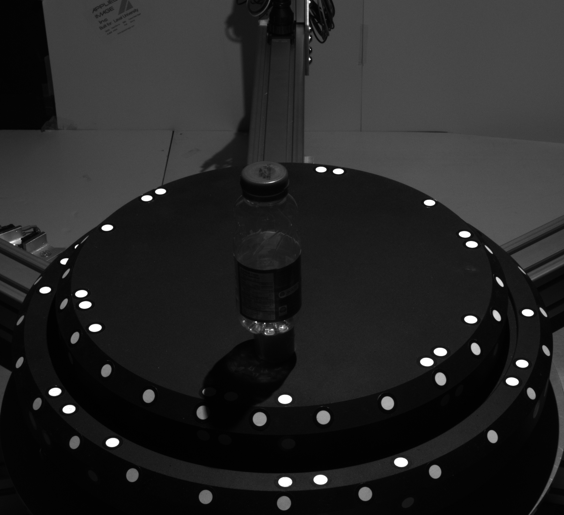
The object is captured from diverse angles and under various lighting conditions using a lighting stage designed at the Computer Vision and Systems Laboratory (CVSL). Once all the data is captured, our frameworks automatically construct the visual hull of the object. This method facilitates the estimation of the geometry of an object with arbitrary shapes and reflective properties, including matte, shiny, reflective, and transparent surfaces.